
SMP ザカール 制作記その6。SPTは頭部がコックピットの為、頭デッカチの印象。このキットでは小顔に作られていて、それはそれで格好良いのですが、今回の作例では大きい頭部でも格好良いザカールを目指します。先ずは肩幅を狭めて頭を大きく見せる作業から。
腕とボディの距離を縮めて頭部を大きく見せる効果を狙う

ガンプラなどバンダイのロボットプラモデルを組んでいていつも感じる事は、腕とボディの距離がやたら離れ過ぎているなと言う印象です。
このザカールにも同じ印象を持ちました。もしかしたら頭部を小さく見せる視覚効果を狙っているのかもしれませんね。
ですが、SPTは本来頭デッカチであるべき!
そこで、頭部の工作はとりあえず後回しにして、今回は肩幅を狭めて頭が大きく見える様な効果を狙っていきたいと思います。
では作業開始。
肩関節の構造を変更
キットは肩の可動を担うボールジョイントが大きな肩装甲パーツごと一体となっていて、その中に肩関節を挟み込む設計の為、パーツの厚みでどうしても肩と腕の距離が離れてしまいます。
この肩パーツの厚みを解消してあげればもう少し腕とボディを近付けられるはず。
そこでキットのパーツは使わず肩パーツをユニットごとに設計し直す事にしました。
構造としては、ボディと肩関節を直接接続する方法に変更して、後から別パーツ化した装甲類を装着出来るようにしたいと思います。
更に、どうせ肩全体を作り直すのですから、外側の大型装甲を可動式にする事で腕の可動範囲を確保。見た目にも情報量が増えて効果的だと思います。
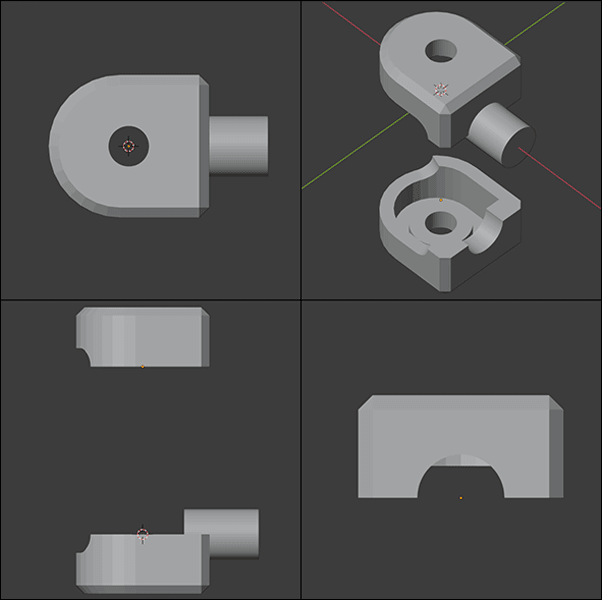
肩関節部とボディを接続させる為に市販のボールジョイントを利用します。
肩軸のボールジョイントにWAVEのBJ-04プラサポ①、肩関節内部に仕込むポリキャップはWAVEのPC-02を使用する事にしました。


最初にポリキャップの径などを採寸しておきます。それらを内部に組み込めるよう、肩のパーツの内部を含めてモデリング、3Dプリンタで出力したものを組立てていきました。
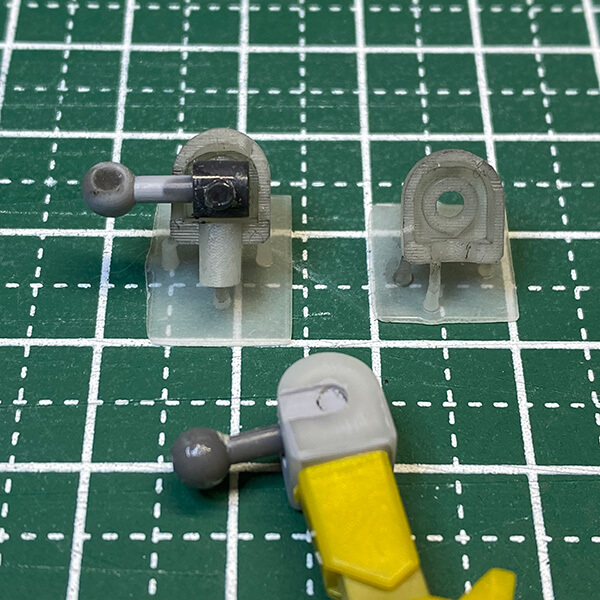
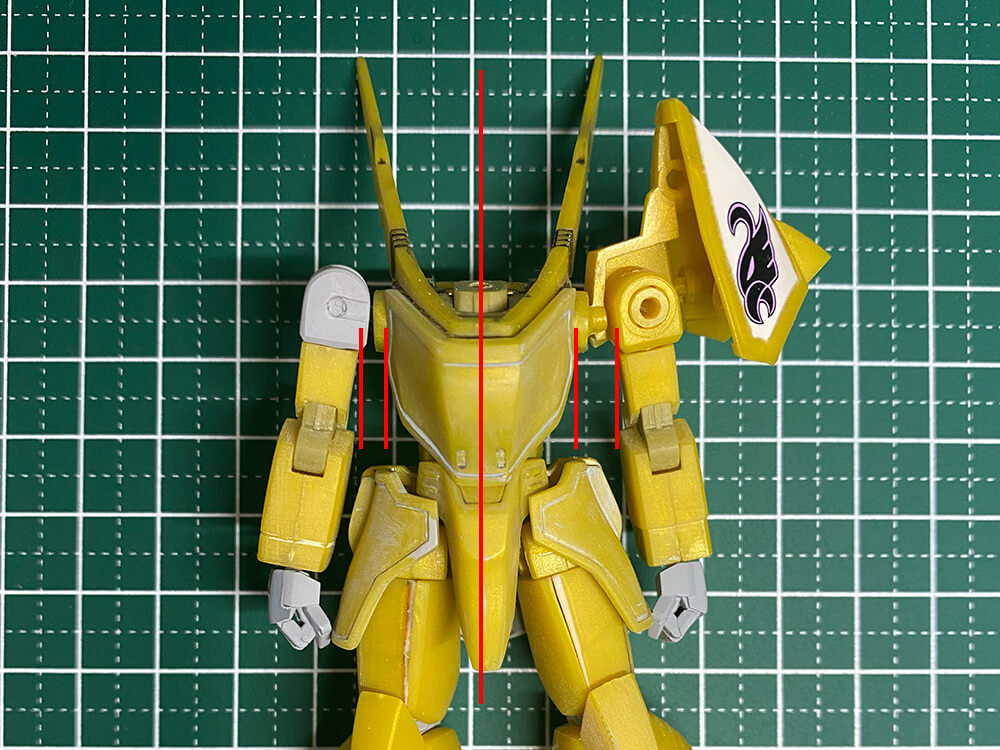
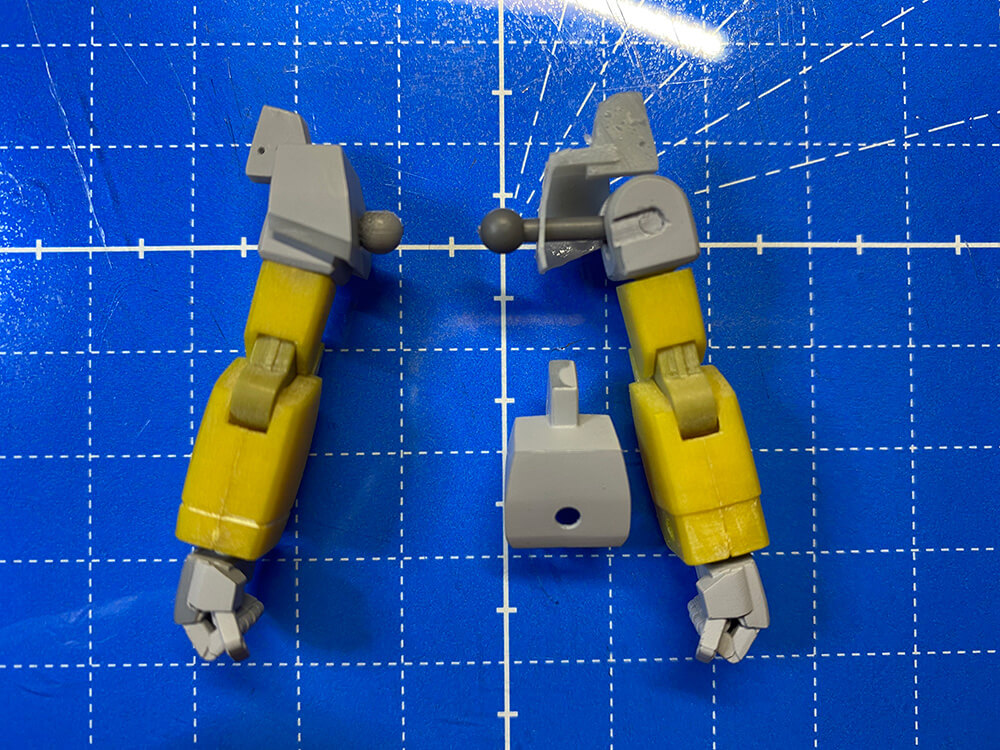
これでだいぶ腕とボディの間隔が狭まりました。脇の空間を見ても随分と隙間が小さくなったことがわかります。
肩アーマーの制作。外側の装甲を可動式に!
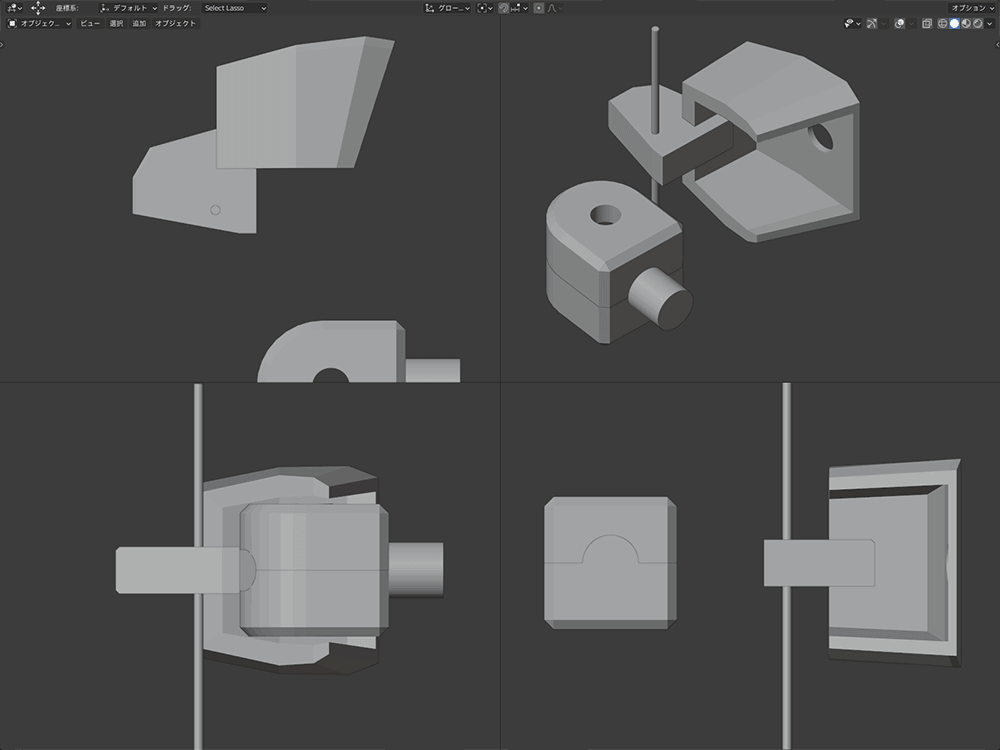
次は肩アーマー(肩関節にかぶさっているボックス状のアーマー。以下肩アーマー)。
肩アーマーは別パーツ化して肩関節パーツとボールジョイントでサンドウィッチする事で固定させましょう。
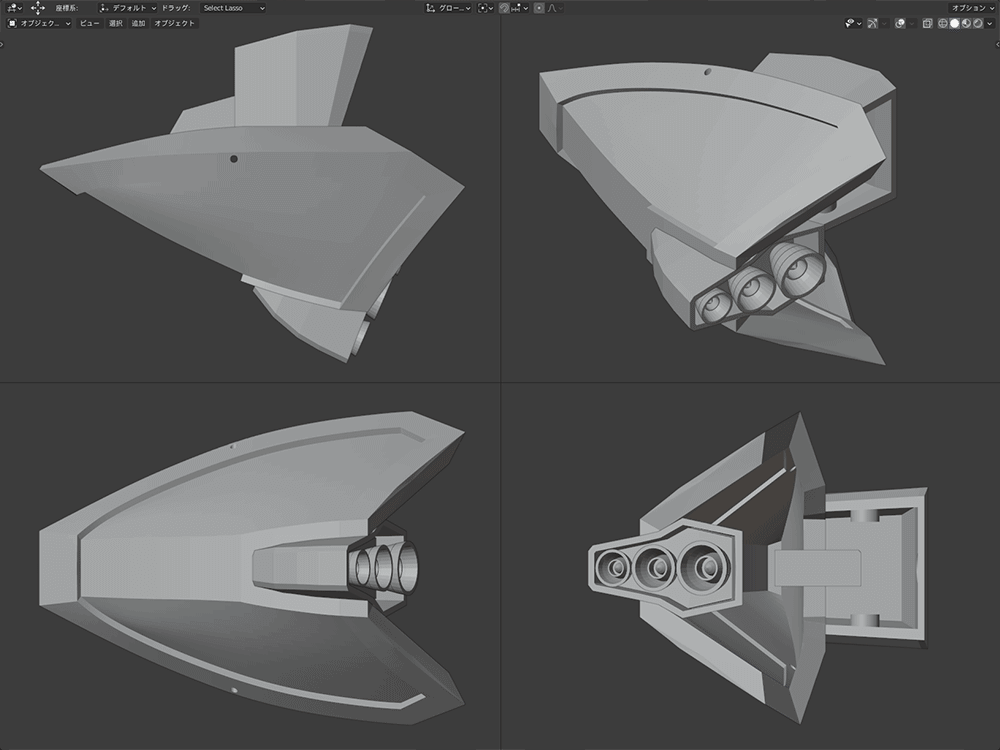
早速モデリングしていきます。キットでは平面的で単純な形状だったので、ほんの少し面を増やして情報量の増加を狙います。
両サイドの大型肩装甲(外側の三角状の大きなユニット。以下大型肩装甲)は別パーツ化するので、肩アーマー上部にある接続基部と思われる突起状のモールドを肩アーマーと一体化させてモデリング。
ココを利用して軸を打って大型肩装甲と接続、腕を上げた時に干渉しないよう可動出来る様にします。
両サイドにある大型の肩装甲を可動式に
大型肩装甲の形状ですが、幅が広すぎ、縦が寸詰まりのような気がして全体的にシャープさに欠けます。更に肩から離れ過ぎていて一体感が感じられません。
当初この部分はキットのパーツを流用しようと思ったのですが、よりシャープな印象にしたいのでココも3Dプリンタで作り直します。
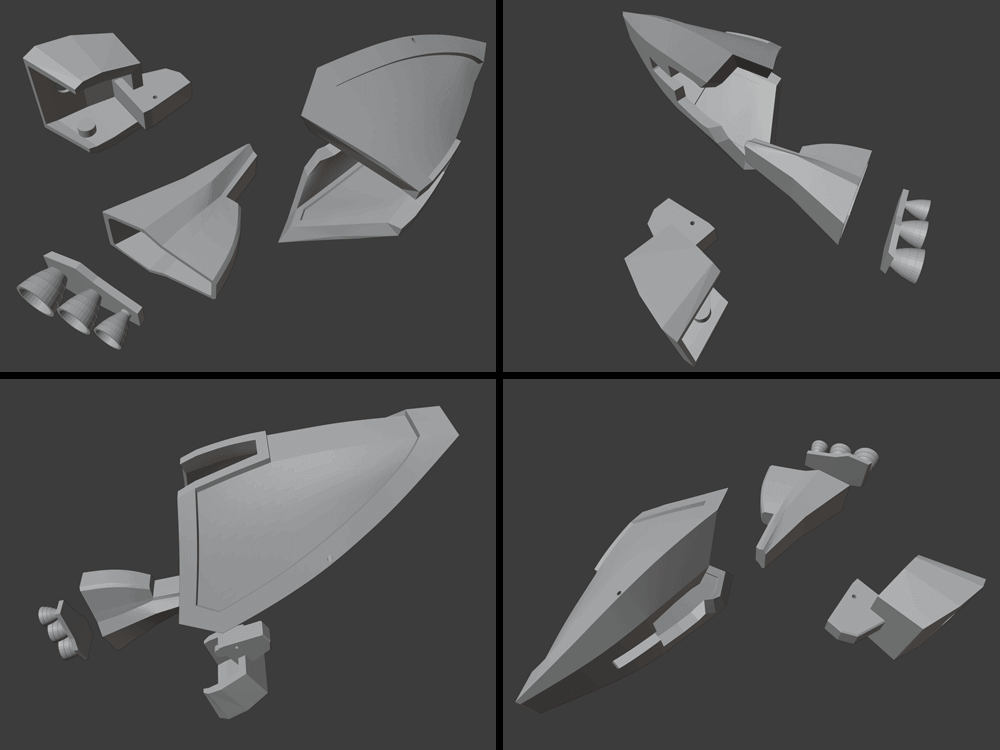
何度か仮出力を経て最終的に、レイズナーのように装甲が肩に埋まる様な雰囲気にしたかったので、肩アーマーの幅を1.5mmほど短くして、大型肩装甲を出来るだけ内側に配置してより肩幅が小さく見えるように修正しました。
出力後のパーツ構成、可動範囲の確認
モデリングが完了したら早速出力。
最終的なパーツ構成は以下のようになりました。
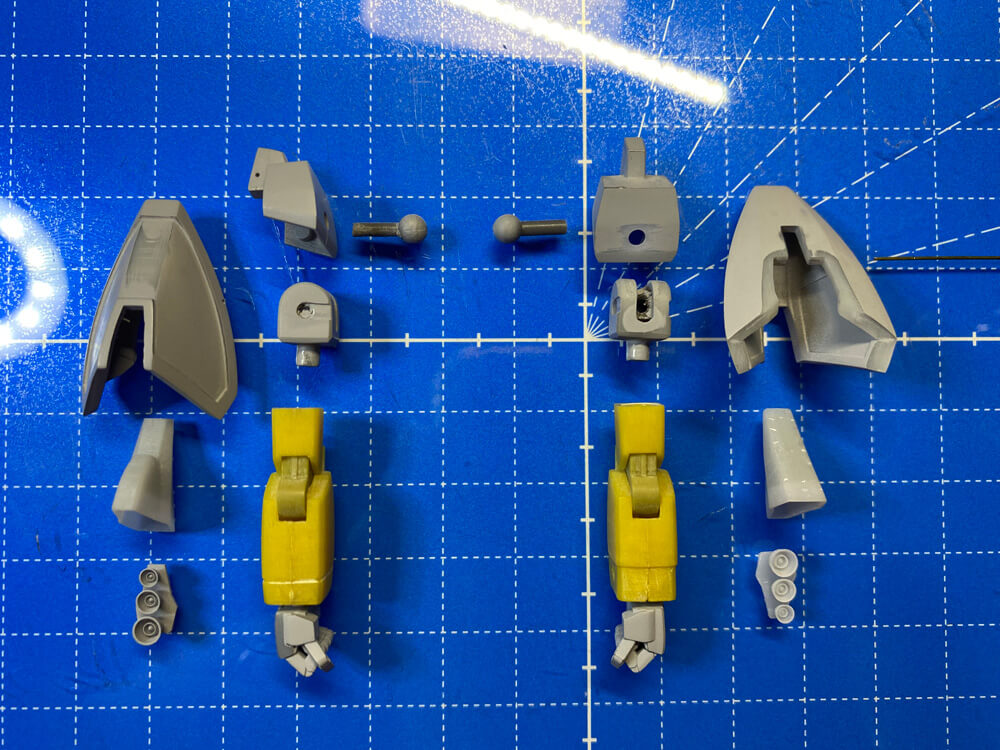
そして大雑把にサポート跡の処理をして実際に組んでみた状態がコチラ。

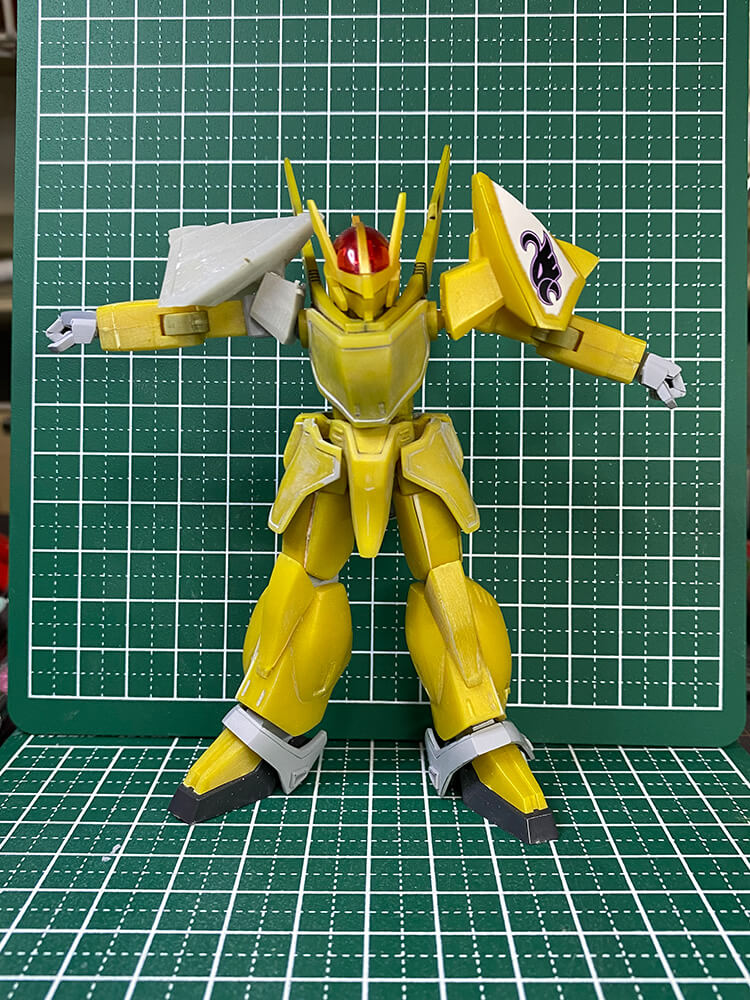
腕を横に振った時、大型肩装甲についているバーニアを大きめに作ったのでキットより可動が制限されてましたが、大型肩装甲が避けてくれる事でキットと同等まで腕を上にあげることが出来る様になりました。
肩アーマーと大型肩装甲の接続には0.5mmの真鍮線を使用しています。
まとめ
本来なら今回の様な作業もアナログで行える実力が欲しいのですが、どうしても3Dプリンタの便利さに頼ってしまいます。
何より自分の実力では到底叶わない精度を手軽に実現してくれるのが最大の魅力ですね。
軸穴の位置をシミュレート出来たり、レジン消費さえ気にしなければトライアンドエラーも思いのまま。
反転や複製もボタンひとつでアッという間。シリコンで型を取る必要もありません。
今後も積極的に利用していきたいと思います。








